10. Potential asteroid fragmentation technology
|
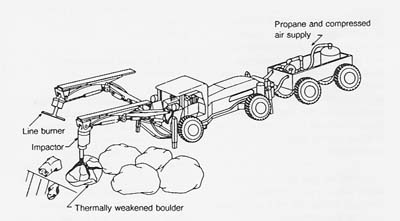
Thermomechanical Boulder Breaker
A mobile thermomechanical boulder breaker could fragment rock by first weakening
it by applying heat (in this concept by means of a burner) and then hitting it with a mechanical impactor.
From Thiruma/ai, Demou, and Fischer 1975, quoted by Maurer 1980, p. 653.
|
Technology for fragmenting rock particles has been researched and developed over
many decades. Conventional fragmentation is primarily mechanical. Its effectiveness on a virtually gravity-free
asteroid will depend in part on the degree to which the mechanical fragmentation system depends on gravity. We
can conceptualize mechanical fragmentation systems that are independent of gravity; i.e., those that work by
splitting or pinching. Also available are a variety of explosive, electrical, chemical, and thermal disintegration
methods. These methods will impose different logistical requirements, depending on what supplies they need and on
how operations are carried out. For example, the efficiency of several fragmentation methods would increase if the
fragmentation took place in drill holes. But drilling holes in asteroids will pose unusual problems (see topic 6).
It may be desirable to distinguish between two classes of fragmentation problems, those where
a single fragment (or a small number of fragments) is to be removed or reduced to certain dimensions, and those
where a large number of particles are to be reduced in size. The latter class of applications is discussed under
topic 15, crushing and grinding. The choice of technology most readily applicable to removal or controlled-size
reduction of a single large block might well benefit from an evaluation of quarrying practice for building stone.
Advanced rock disintegration techniques, some of which should have direct applicability to space operations, are
summarized by Maurer (1980).
|
11. Automation, operator proficiency, and excavation efficiency
Eliminating the need for human operators would significantly enhance the economic attractiveness of
nonterrestrial mining. Few attempts have been made at developing fully automated mining excavation cycles; i.e.,
operations without human intervention. The economic incentives for doing so on Earth are marginal, at best.
Fully automating the mechanical excavation and loading of broken rock is likely to result in
drastic productivity losses. It is well established that the productivity of virtually all excavation and loading
equipment is highly sensitive to the expertise of the operator. Human judgment and fast response to seemingly minor
aspects of rock loading operations are significant production and safety factors. Of particular concern in this
context is that misjudgment by an operator can result in serious, even disastrous, consequences, such as cables
breaking and machines overturning. Control engineering will have to preclude such occurrences as well as assure
a reasonable production level.
The importance of human judgment in excavation technologies suggests a number of avenues for
research aimed at identifying candidates for automation and nonterrestrial application. Questions that can be
raised include the following: Will the implementation of automatic operation be most difficult for equipment
that is most sensitive to operator handling? Should automation be preferentially applied to excavation technologies
that are robust or insensitive to operator errors? What tradeoffs are acceptable between automatic control and productivity?
To allow automation, operations should be as simple as possible. This fact, explicitly recognized
in the space program (e.g., Firschein et al. 1986, p. 103), unquestionably underlies the mining industry's reluctance
even to attempt to automate most excavation methods. The few notable exceptions (Iongwall mining, tunnel boring) for
which automation is being investigated are already fully mechanized (involve minimal human intervention during normal
operations). These exceptions tend to be high-production systems. They are prone to frequent breakdown and require
preventive maintenance. Maintenance is recognized as a major difficulty in implementing automation (e.g., Firschein
et al. 1986, p. 355); it will require major developments in artificial intelligence software and robotics. The need
for human reasoning capability is again apparent.
12. The influence of gravity on slusher mining
Gertsch identifies slusher mining as one of the more promising
lunar mining methods. The performance of a slusher on the lunar surface (or
in underground operations on the Moon) will be affected by the low gravity.
The lighter weight of the scraper (bucket) on the Moon may lower the loading
efficiency of the slusher bucket, because the weight influences the vertical
penetrating force into the material to be loaded. Conversely, the lighter weight
lunar material may flow more easily up into the bucket. It is conceivable that
artificial weighting down of the bucket, or a reconfiguration of the cable force
system, might be required in order to assure adequate penetration into the lunar
soil and to avoid riding of the (empty or partially filled) bucket over the
material to be loaded. Conversely, friction, abrasive wear, and power requirements
during both inhaul and outhaul may be significantly reduced by the low gravity.
The reduced effective weight of the bucket, which is likely to have a detrimental
impact on the efficiency of the all-important bucket-loading phase, might also
adversely affect the performance of the bucket as it is hauled in to the unloading
point. Assuming a relatively rough and bumpy ride during inhaul, the bucket
may not retain its full load. An analysis might suggest a reduction in hauling
speed, but this might also affect production adversely. It is possible that bucket redesign
and cable reconfiguration might compensate at least partially for the reduced
effective bucket weight.
Given the interest by this group in the application of slusher mining to the
lunar program, it may be appropriate to outline in some detail steps that could
be taken to reduce the need for speculation about the performance of such systems
on the Moon.
Obtaining a clear understanding of the mechanics of bucket loading
would be a desirable step. This step could be initiated with a comprehensive
literature survey. It is unlikely that much fundamental information is available
about slusher bucket mechanics, but considerable analysis has been made of the
mechanics of similar excavation elements, such as dragline buckets, bulldozer
blades, front-end loader buckets, and scrapers. Integrating this knowledge in
a framework emphasizing the mechanical differences between terrestrial operating
conditions and lunar operating conditions would go a long way towards identifying
potential problems. Such an integrating effort should be made by a group with
a clear understanding of the fundamental mechanics of the machine (bucket) and
material (broken rock). At a minimum, meetings should be organized with experienced
bucket designers from various manufacturers. In order to obtain maximum contributions
from such personnel, it may be preferable to formally contract for their technical
services. Equally important would be information exchanges with operators; e.g.,
by means of visits to mines.
On the basis of the initial analyses, it should be possible to make preliminary
estimates of the influence of gravity on bucket loading performance. This information
could in turn form the basis for designing experiments (for example, experiments
using centrifuges) to verify the analyses. Similarly, it may be possible to
instrument buckets and their cables and chains in order to obtain a better understanding
of the distribution of forces during loading. An appropriate iterative sequence
of bucket analyses, experiments, and design modifications should provide a considerably
improved understanding of bucket mechanics, ultimately leading to adequate bucket
designs for drastically different operating conditions.
While I have emphasized slusher bucket development, I should point out that
any studies of this type, aimed at an improved understanding of the mechanics
of loading broken rock, will be beneficial for eventual redesign of other systems
that might be considered for nonterrestrial loading operations. These would
include hydraulic excavators, electric shovels, front-end loaders, bulldozers,
scrapers, draglines, and clamshells.
Next
Table of Contents
This site was hosted by the NASA Ames Research Center from 1994-2018 and is now hosted by:

